Jakie konstrukcje powstają w ramach naszego koła, jakie pomysły chodzą nam po głowie? Tego dowiecie się będąc członkami naszego koła. Na tej stronie pokażemy wam tylko niektóre z naszych realizacji, przedstawicieli różnych typów konstrukcji.
Helikopter Eagle

- U góry: Helikopter Eagle.
Na dolej: Przykładowe zdjęcie gmachu głównego PG wykonane przez robota.

Q-Fix – niepozorny robot „myślący”
Q-Fix był projektem na miarę koła naukowego podlegającego pod Katedrę Systemów Decyzyjnych i Robotyki. Jest to mobilny, autonomiczny robot, wykorzystujący model psychiki człowieka. Elementy sztucznej inteligencji w nim zawarte pozwalają na samodzielne podejmowanie decyzji dotyczących kontroli i sterowania robotem.

Q-Fix wzbudził ciekawość i pożądanie zarówno członków koła jak i uczestników oraz obserwatorów Nocy Robotów.
Quadrocopter Fenix
Popularna ostatnimi czasu czterośmigłowiec, w tym wypadku na ramie w kształcie plusa. Poniższa konstrukcja umieszczona w drewniano-metalowym stelażu prezentuje swoje możliwości bez siania popłochu w namiocie. Jednocześnie jest to świetna platforma testowa, dzięki której możemy modyfikować zarówno sprzęt jak i przede wszystkim program, bez obaw o zniszczenia powodowane przez ewentualne błędy czy usterki, które w powietrzu są bezlitosne.
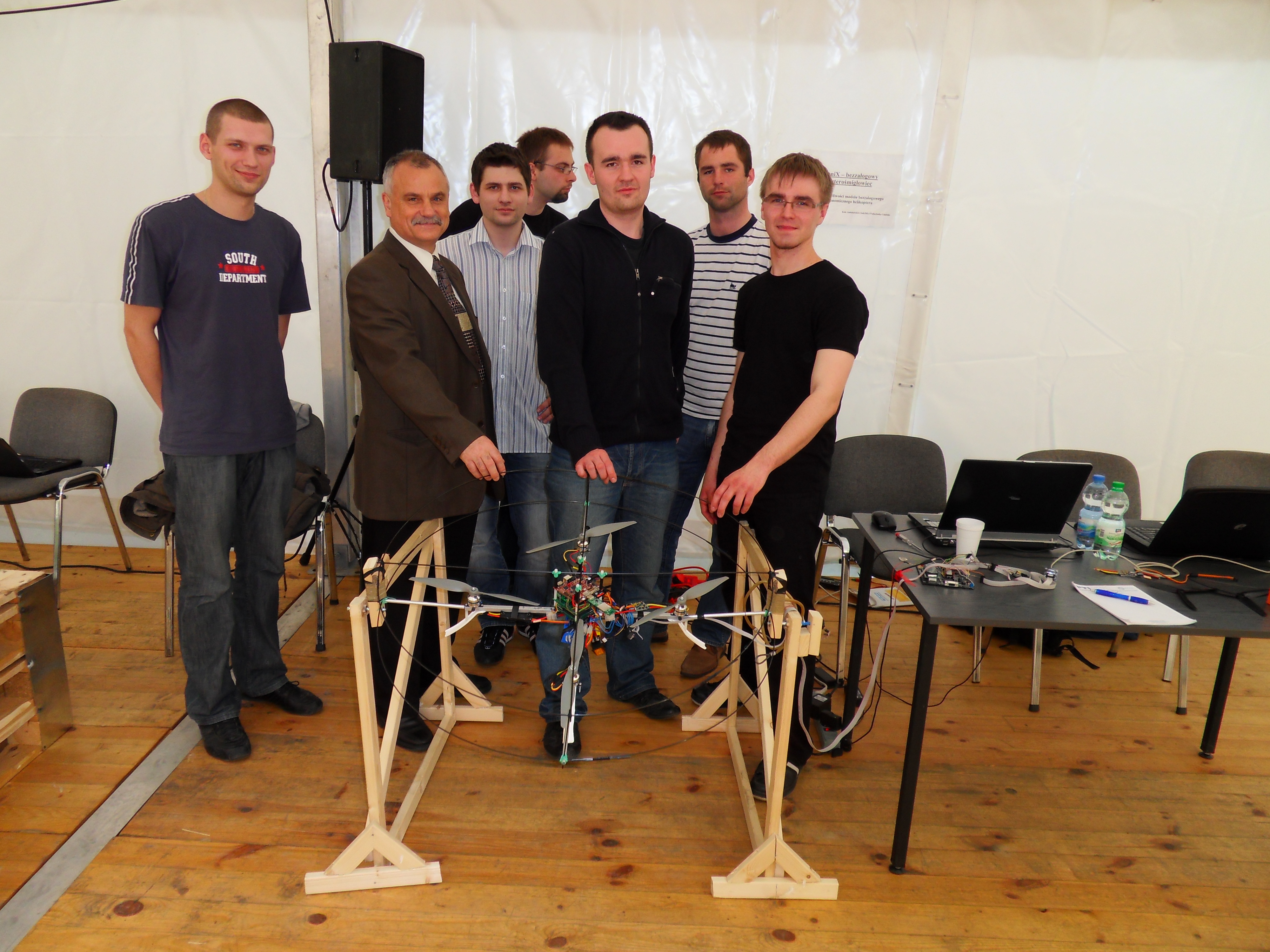
FeniX na wystawie Noc Robotow która odbyła się w 2010 roku Przemysłowym Instytucie Automatyki i Pomiarów w Warszawie


Pojazd zwiadowczy
Każdy zwiadowca powinien być świetnie wyposażony silny i niezawodny i taki właśnie jest ten robot. Wyposażony w manipulator oraz łączność bezprzewodową pozwala zbadać przedmioty, do których osobiście woleli byśmy się jednak nie zbliżać.

Robot przed przykładową przeszkodą z europalet.

Zespół projektantów z Politechniki Gdańskiej.
Sterowiec Scienter
Zapraszamy do przeczytania o tym ciekawym projekcie w zakładce historia, kliknij na zdjęcia poniżej.
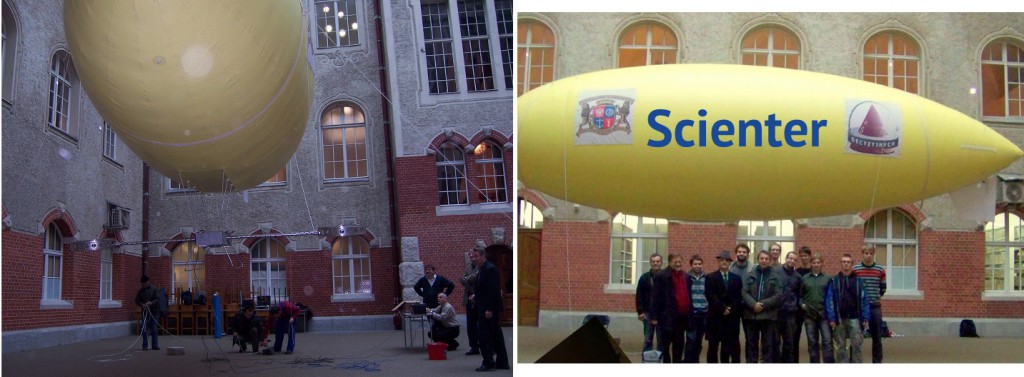
Po lewej: Próbny lot pod nadzorem pracowników Katedry Systemów Decyzyjnych i Robotyki.
Po prawej: Zespół projektantów i wykonawców sterowca Scienter.
![]()